
Because of robots and math , some times the robot will have to have some unexpected moves, like flip and rotate joints that you(see: casual) werent expecting. They also cause unexpected speed errors while i run programs. I am not writing programs offline at the moment, and the jobs that the robot will be running are more sensitive to the form of the entire robot, as apposed to the tip of the robot.
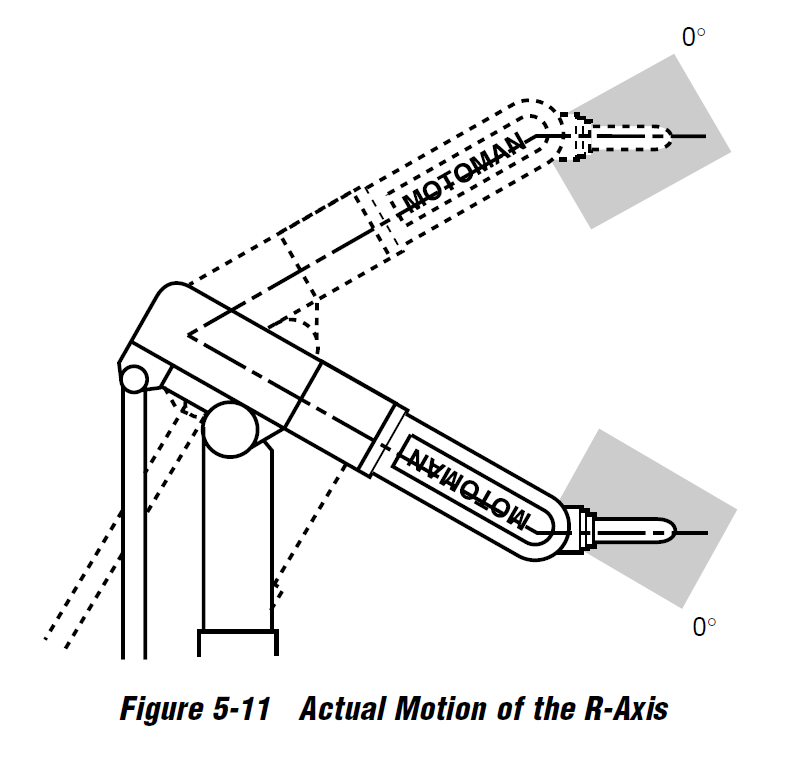
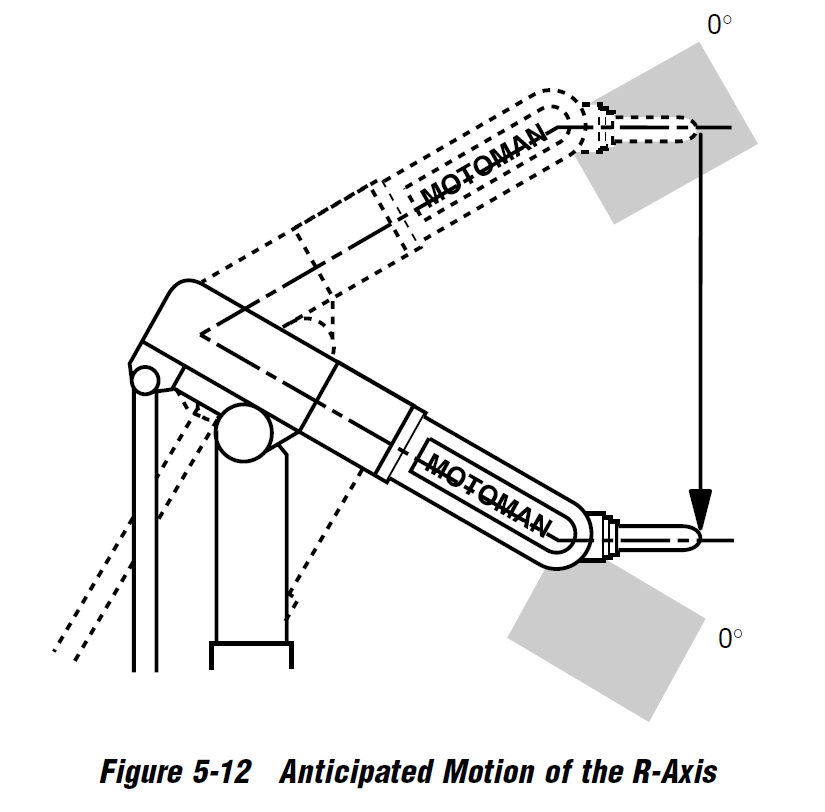
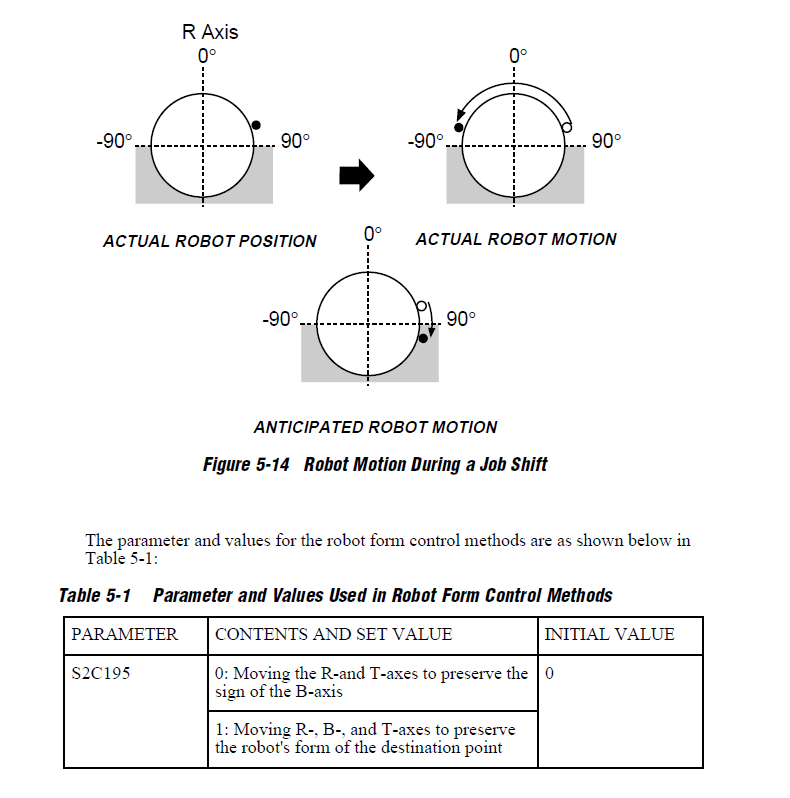
To preserve the sine of the “B” axis, when the robot makes a move, like in fig 5-11 and 5-12, you would think it moves like 5-12
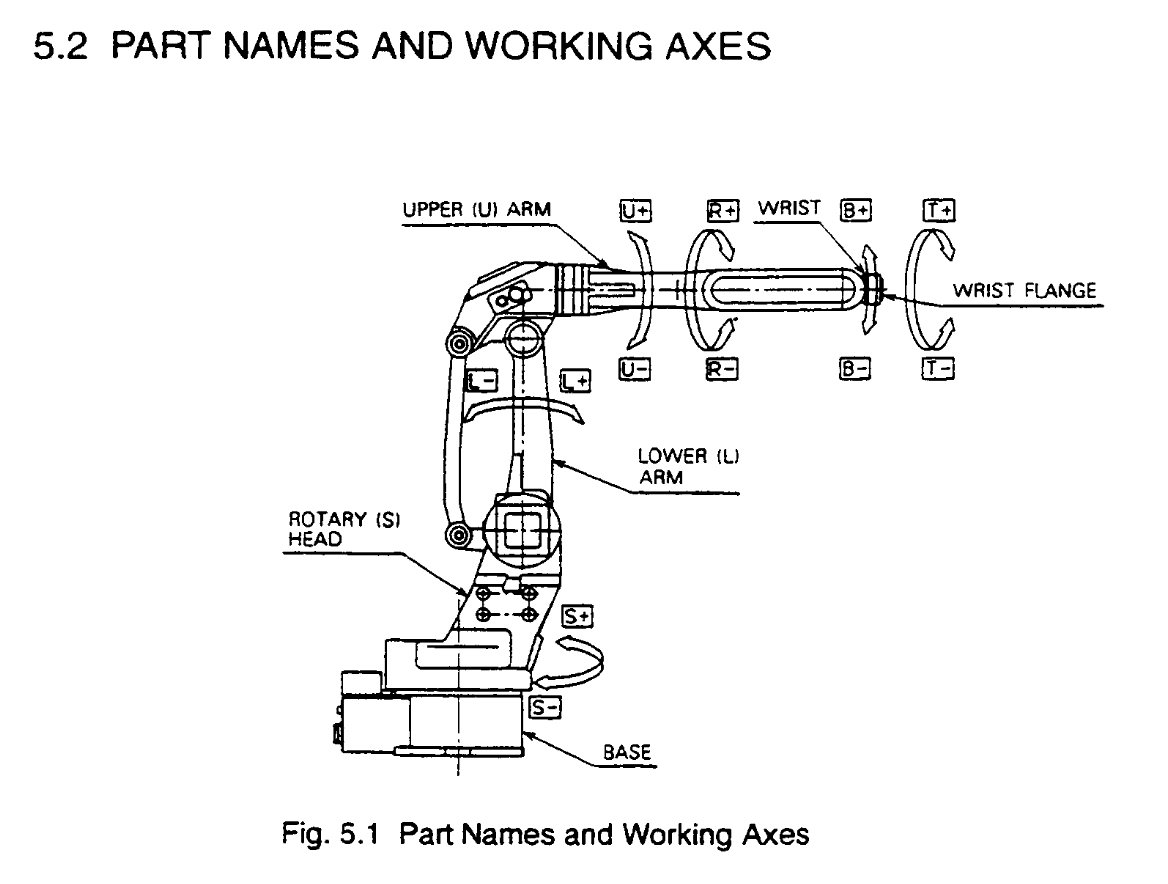
what the robot really does , as the robot axis are moving it downward, to preserbe the sine angle of “B”, it will rotate the T and R axis (refer to chart at the top)
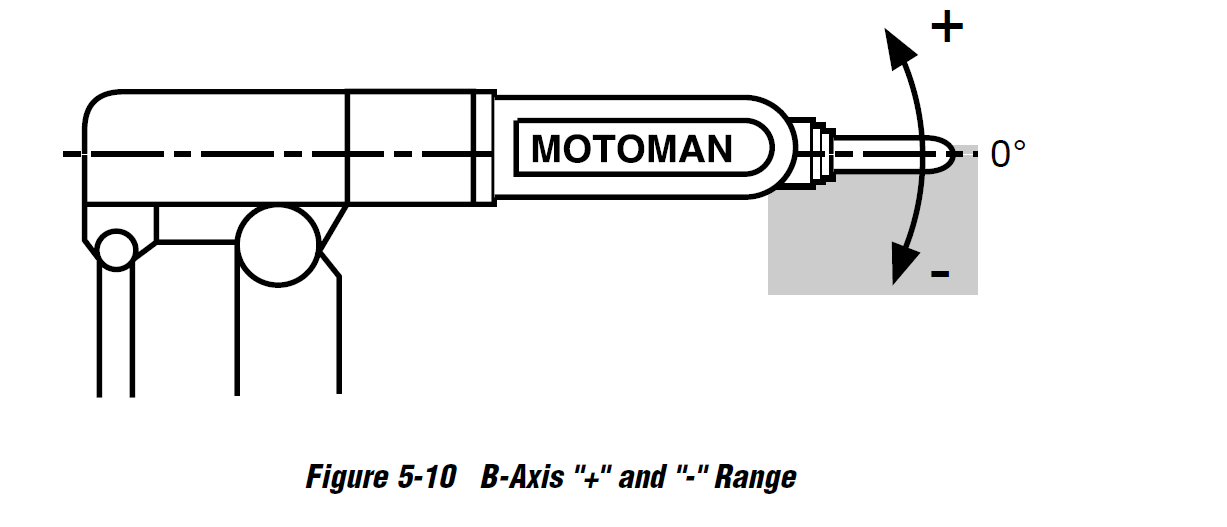
The robot will rotate joint “R” 180* or what ever, to maintain this angle of 0* on the “B” joint. The “T” joint will rotate 180 to keep the tool in the same position
The robot basically turns it self inside out, and for some reason speeds up a it does this and creates excessive speed errors and fucked up joint positions
“Sign of B”? fuck, im not changing it. is it suppossed to be Sine or sign?
At any rate, when the robot makes the rapid, and sometimes startling moves while moving, Because of the delicate nature of work we will be doing, this moves might cause a collision with the operator and the robot joints. Because we will be doing fancy articulated moves like swirls, and shit, we cannot have the robot making this unpredictable moves and smashing into the inner thighs of the operator and causing the robot to alarm, We have to fix it. I will change the robot parameters to preserve the tobots form of the destination point, this will give us the desired effect i am thinking as insteqad of moving the whole robot to maintain its point, it will focus on the whole picture of the robot and i am hoping for smoother and less unpredictabkle moves
Here is the robot, doing what i think is trying to preserve the sine of “B”
I have made a change top the parameters in hops that it doesnt do this anymore.
I also have no idea if this is what i want or if what im doing will get me the results i want.
Motoman made these pics 100%. they drew enough diagrams about it, right from the fucking manual. they expect me to add dicks to robots