it cost how much? for 17 pin amphanol connector? is it made of fucking gold? oh just gold plated ok. well still fuck that. around $60 for one connector. I need 3. and its only 17 pin . fuck that we can do better. probably.
AMPHANAL CONNECTOR
THIS WAS A RETROACTIVE POST. THIS ENTRY WAS LOGGED FROM MONTHS AGO BUT I FORGOT TO POST IT- 2016-8-17
UPDATE 2016-8-17
i dont remember when i finished this, but im posting it now so shut up
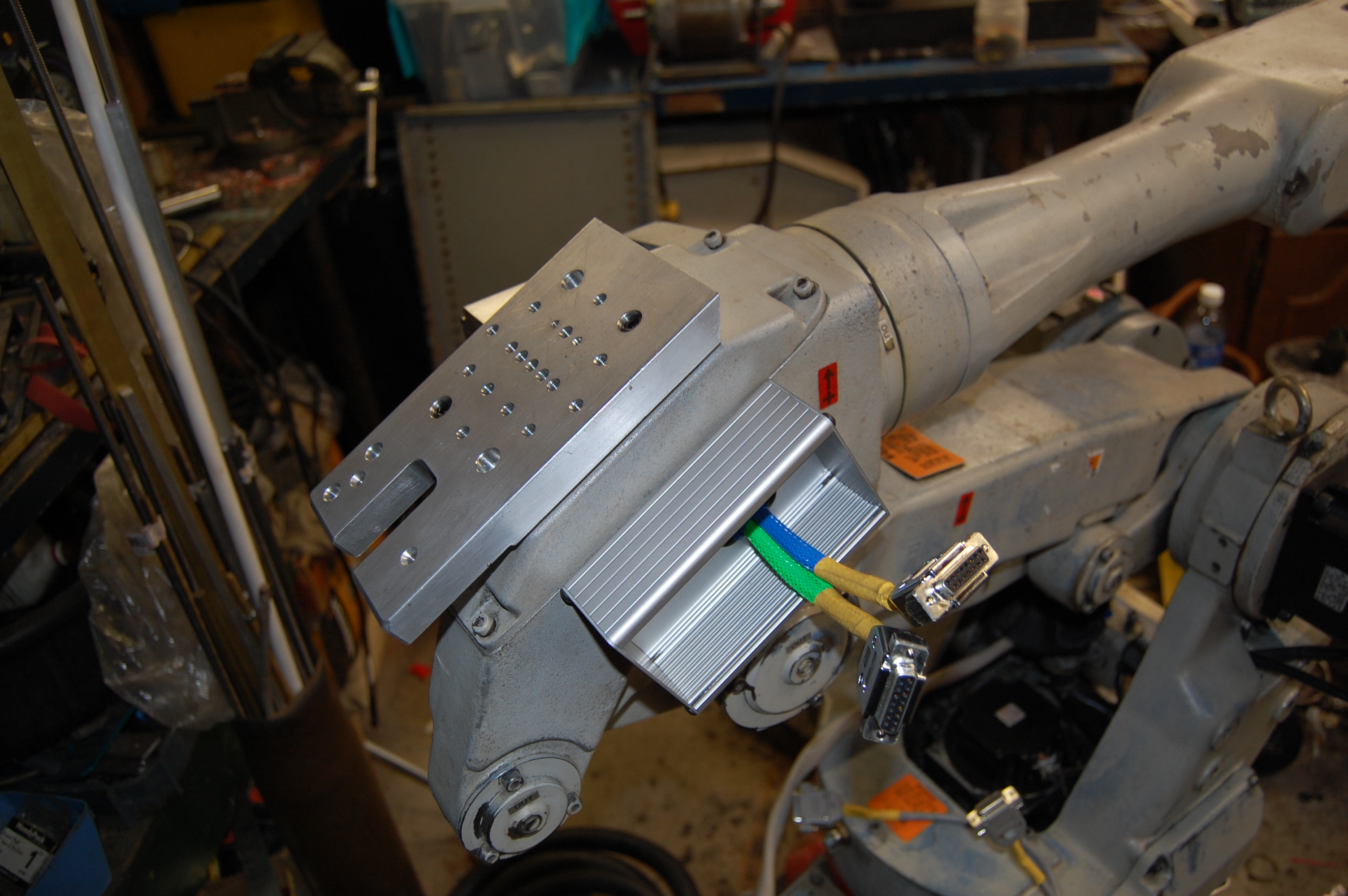
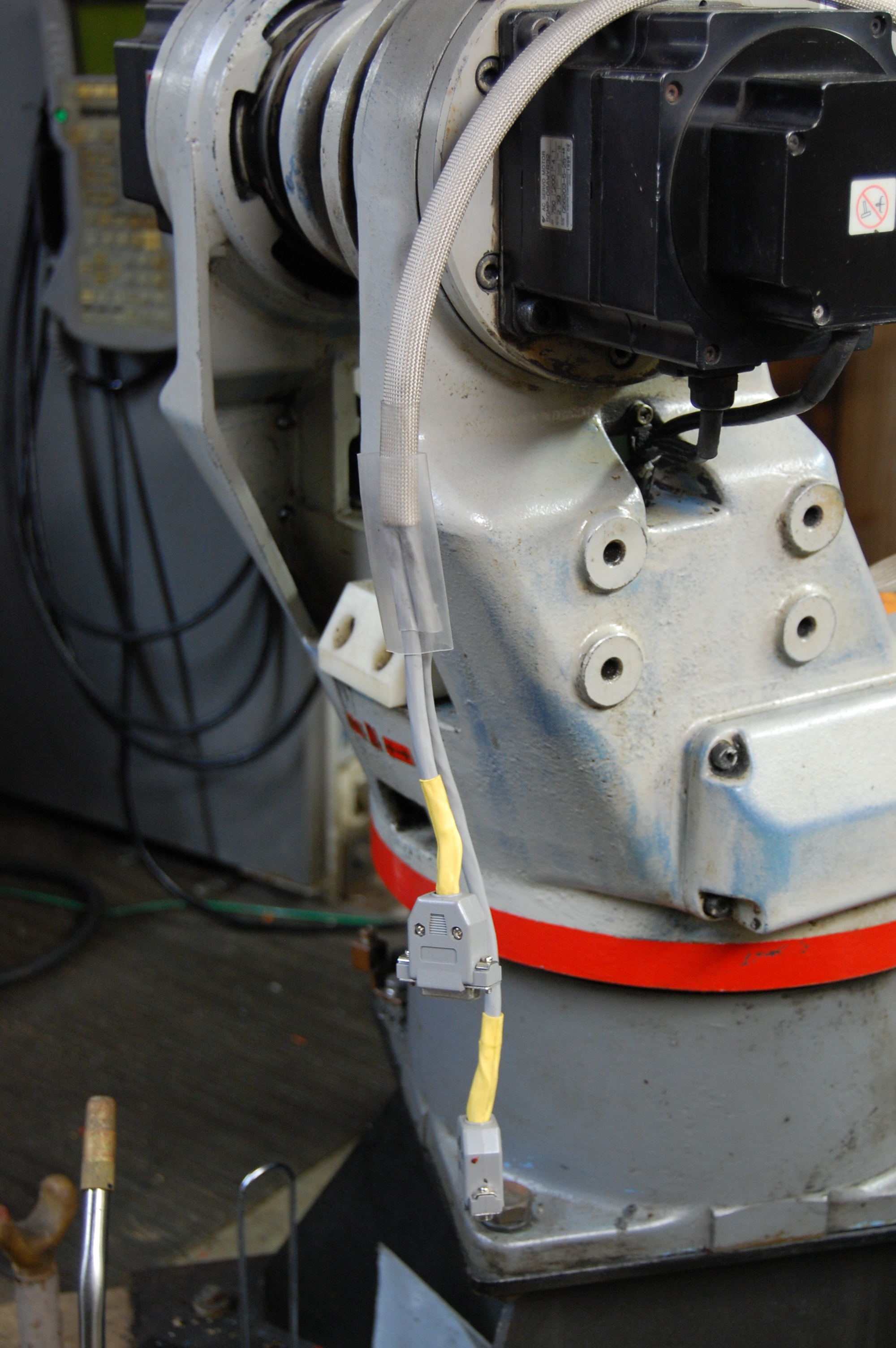
step 1 -made 2 DB15 cables
step2-jam them up the robots ass
step3- i only have yellow or clear 12mm shrink tubing
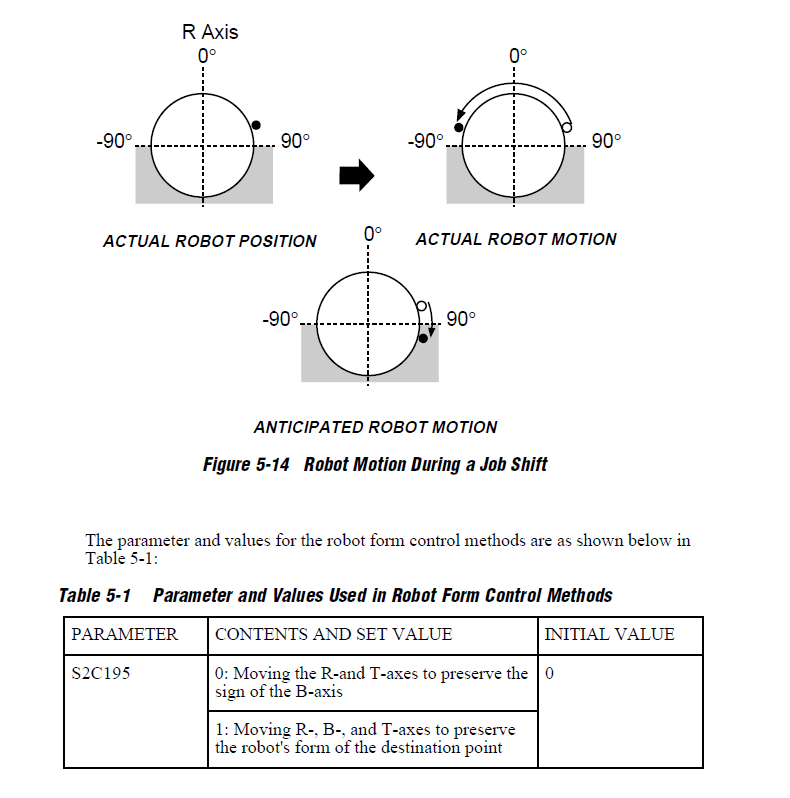
Because of robots and math , some times the robot will have to have some unexpected moves, like flip and rotate joints that you(see: casual) werent expecting. They also cause unexpected speed errors while i run programs. I am not writing programs offline at the moment, and the jobs that the robot will be running are more sensitive to the form of the entire robot, as apposed to the tip of the robot.
Motoman logo=upside down
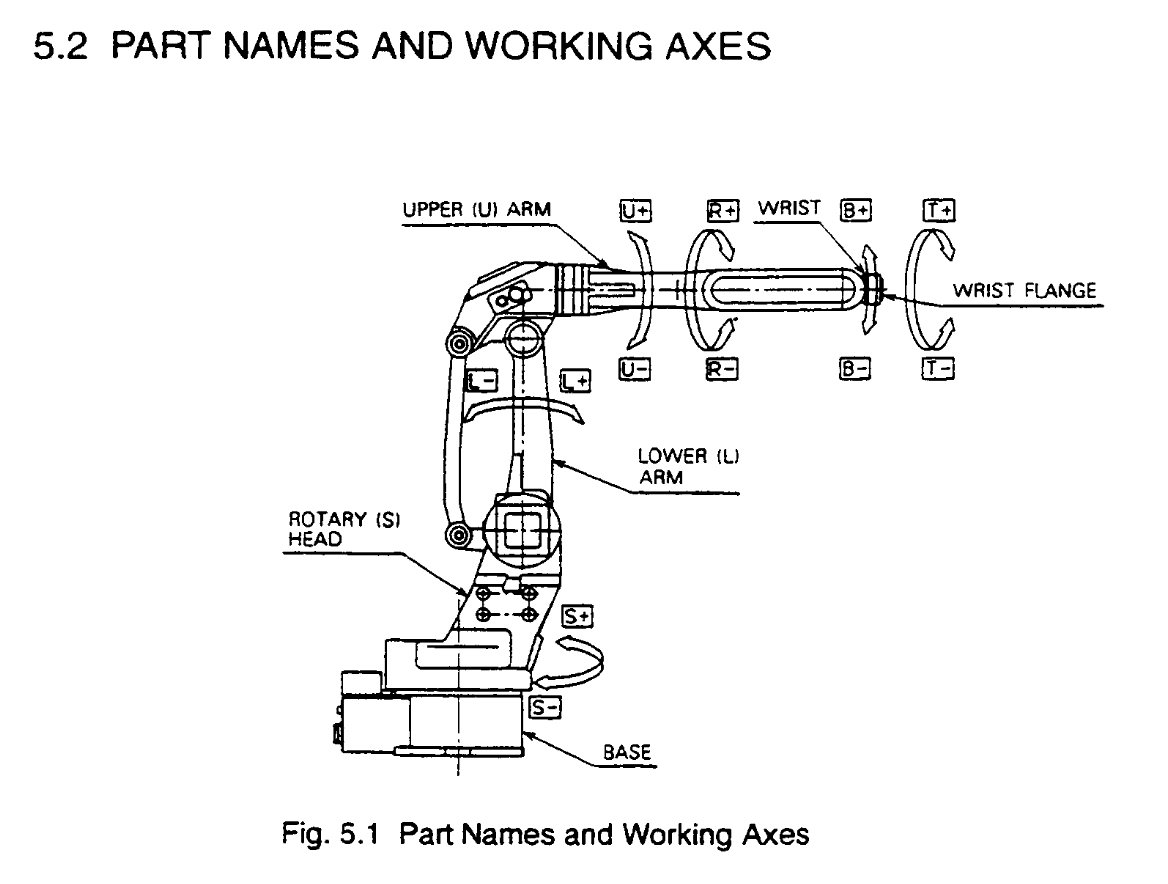
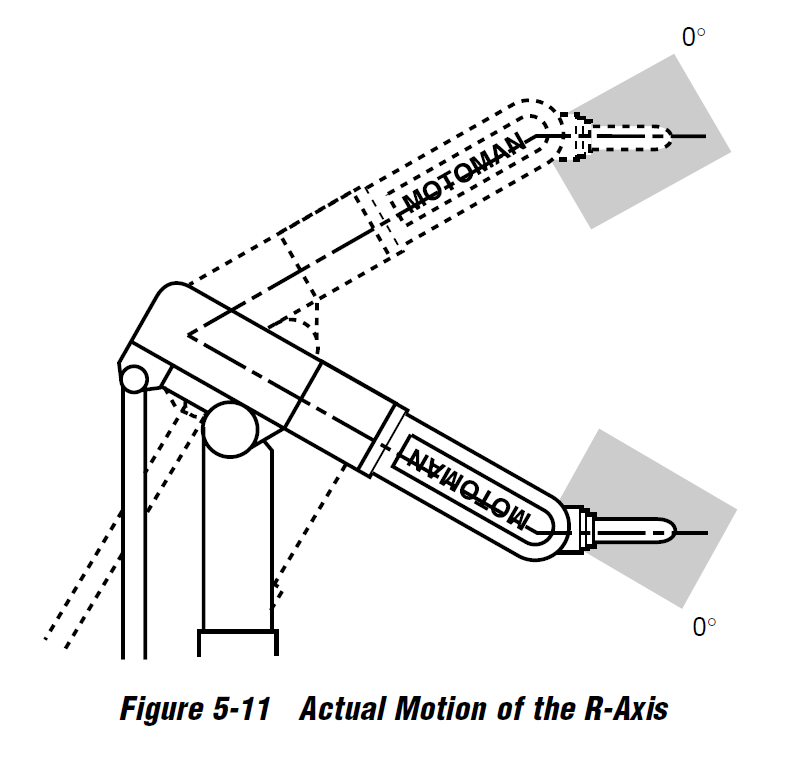
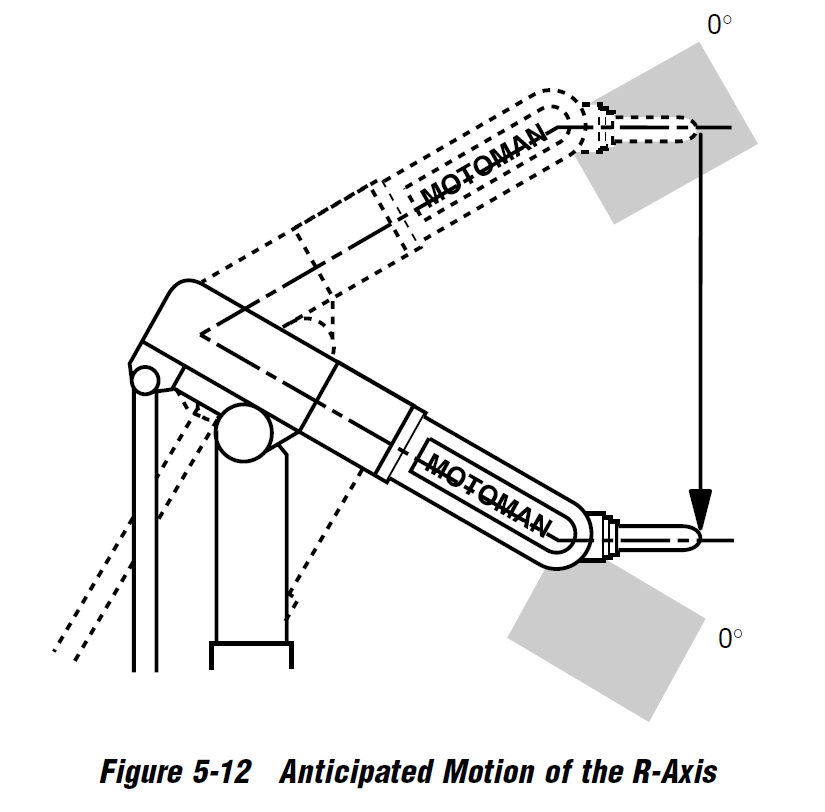
To preserve the sine of the “B” axis, when the robot makes a move, like in fig 5-11 and 5-12, you would think it moves like 5-12
what the robot really does , as the robot axis are moving it downward, to preserbe the sine angle of “B”, it will rotate the T and R axis (refer to chart at the top)
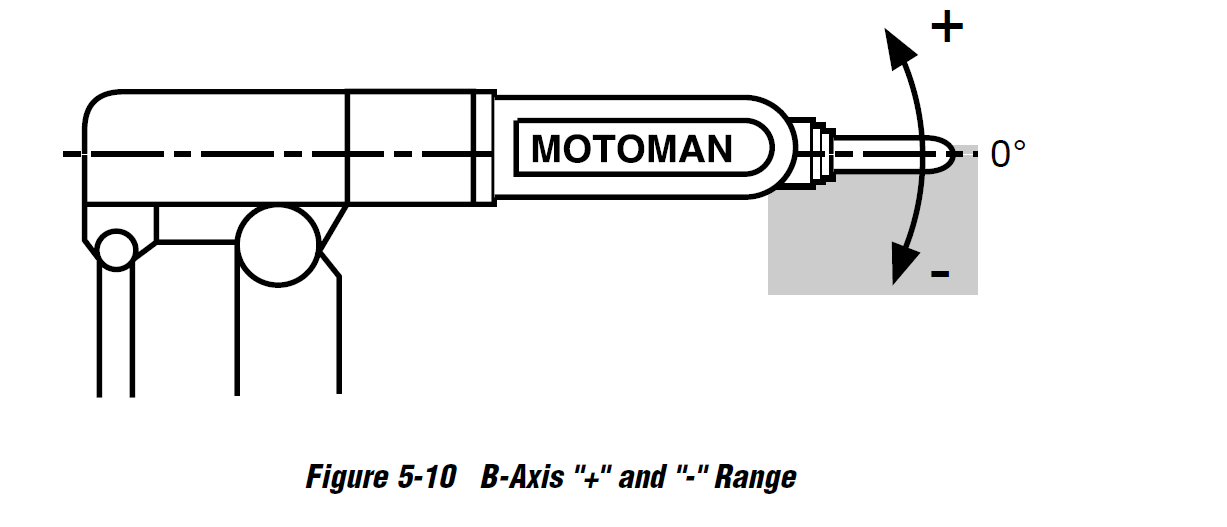
The robot will rotate joint “R” 180* or what ever, to maintain this angle of 0* on the “B” joint. The “T” joint will rotate 180 to keep the tool in the same position
The robot basically turns it self inside out, and for some reason speeds up a it does this and creates excessive speed errors and fucked up joint positions
“Sign of B”? fuck, im not changing it. is it suppossed to be Sine or sign?
At any rate, when the robot makes the rapid, and sometimes startling moves while moving, Because of the delicate nature of work we will be doing, this moves might cause a collision with the operator and the robot joints. Because we will be doing fancy articulated moves like swirls, and shit, we cannot have the robot making this unpredictable moves and smashing into the inner thighs of the operator and causing the robot to alarm, We have to fix it. I will change the robot parameters to preserve the tobots form of the destination point, this will give us the desired effect i am thinking as insteqad of moving the whole robot to maintain its point, it will focus on the whole picture of the robot and i am hoping for smoother and less unpredictabkle moves
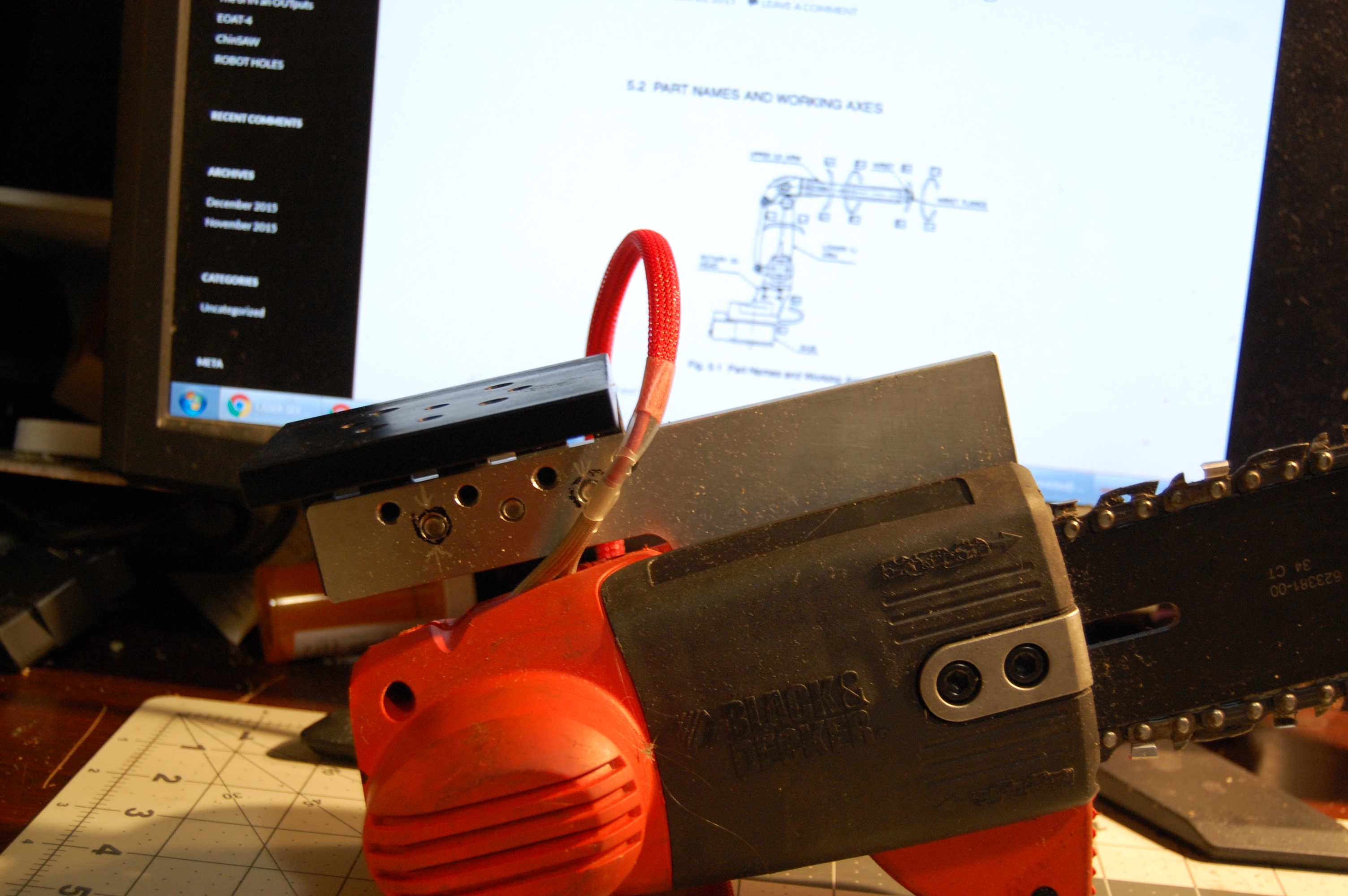
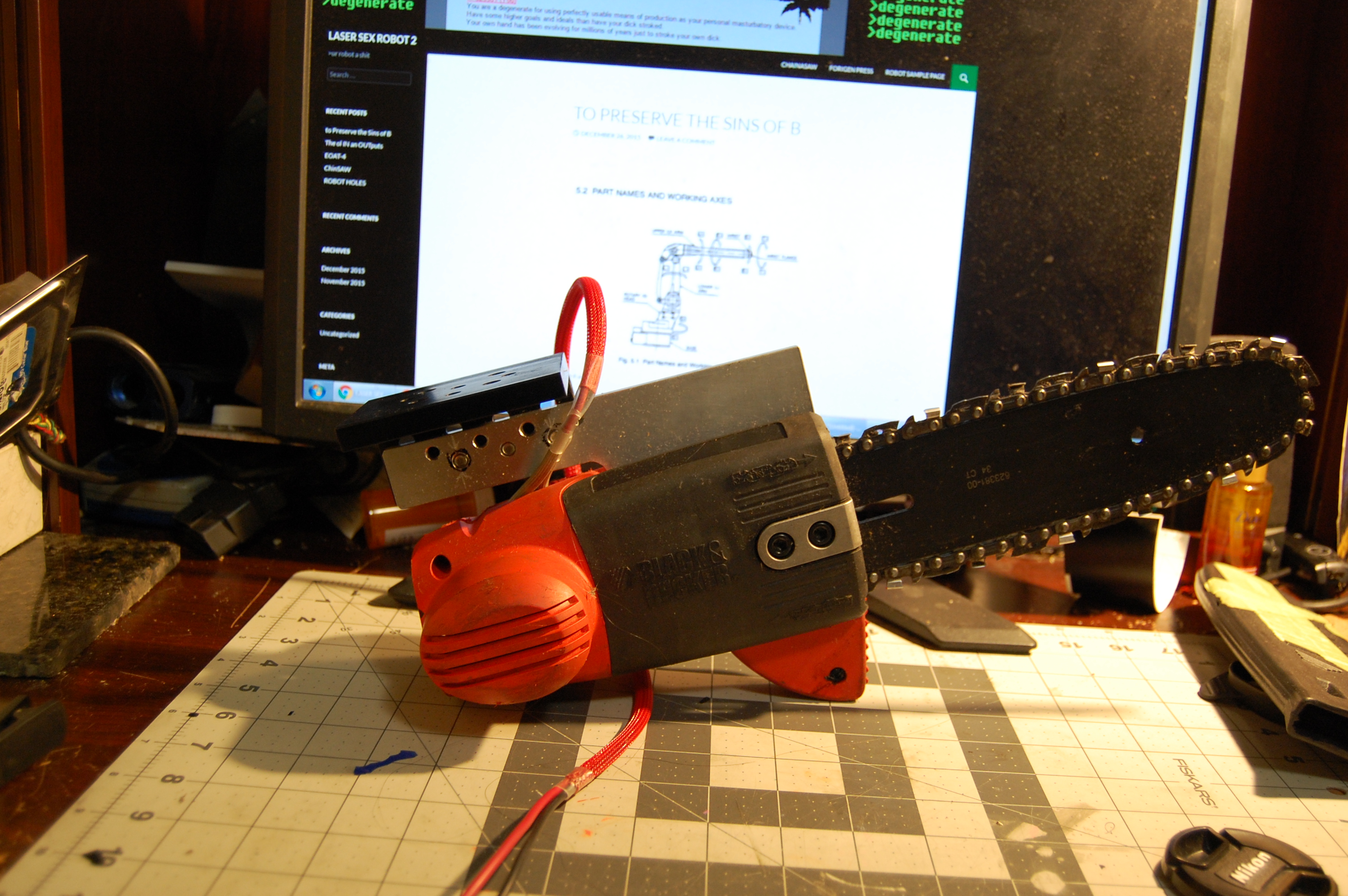
Here is the robot, doing what i think is trying to preserve the sine of “B”
I have made a change top the parameters in hops that it doesnt do this anymore.
I also have no idea if this is what i want or if what im doing will get me the results i want.
Motoman made these pics 100%. they drew enough diagrams about it, right from the fucking manual. they expect me to add dicks to robots
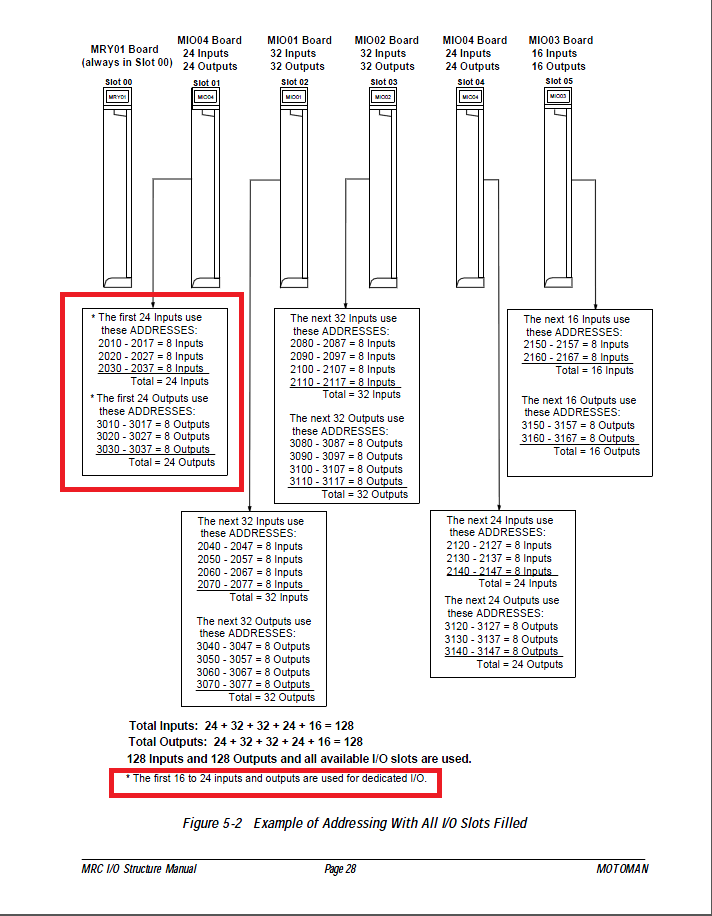
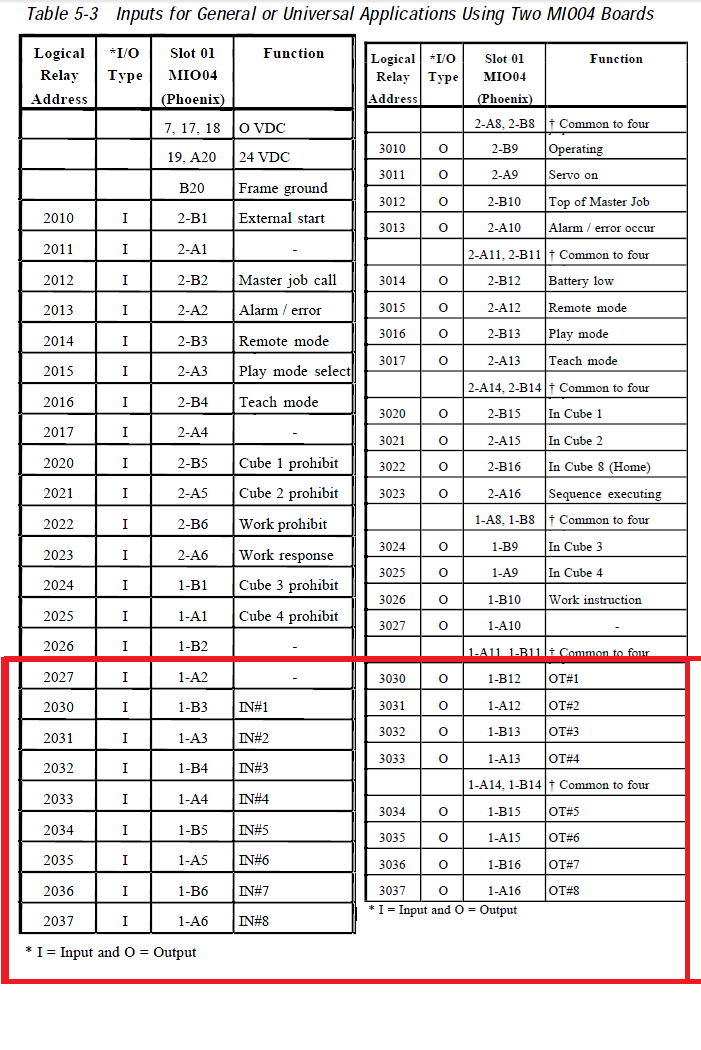
KEBVIN; Ight lets see what we can do with 24 of each. let me just see the addresses,…..
IO address
24 of each becomes 8 real fast when there is a pile of dedicated bullshit that you cannot work around…
So I have
8 NPN INPUTS
8 RELAY OUTPUTS
not 24 of each
Dis is some ol bullshit but we can work with it.
MRY01b-1 : i/o board for external run commands such as
SVON (servo on)
ESTOP
RUN
TEACH
REMOTE
Force sensor (disabled)
MIO04-This is our i/o board we will be dealing with most, General purpose i/o’s
MEW02- this was the arc welding board (for this arc welding robot) This board was the first thing to blow up. When i first hooked up my power supply and powered it on for the first time, a big cloud of smoke came out of this board. Ive since replaced the blown resistor, but i dont have a need for this board yet and dont want to fuck with is.
This is my cable shit that will go inside the panel and hook up to the MIO04
This is an early picture of my operator control panel
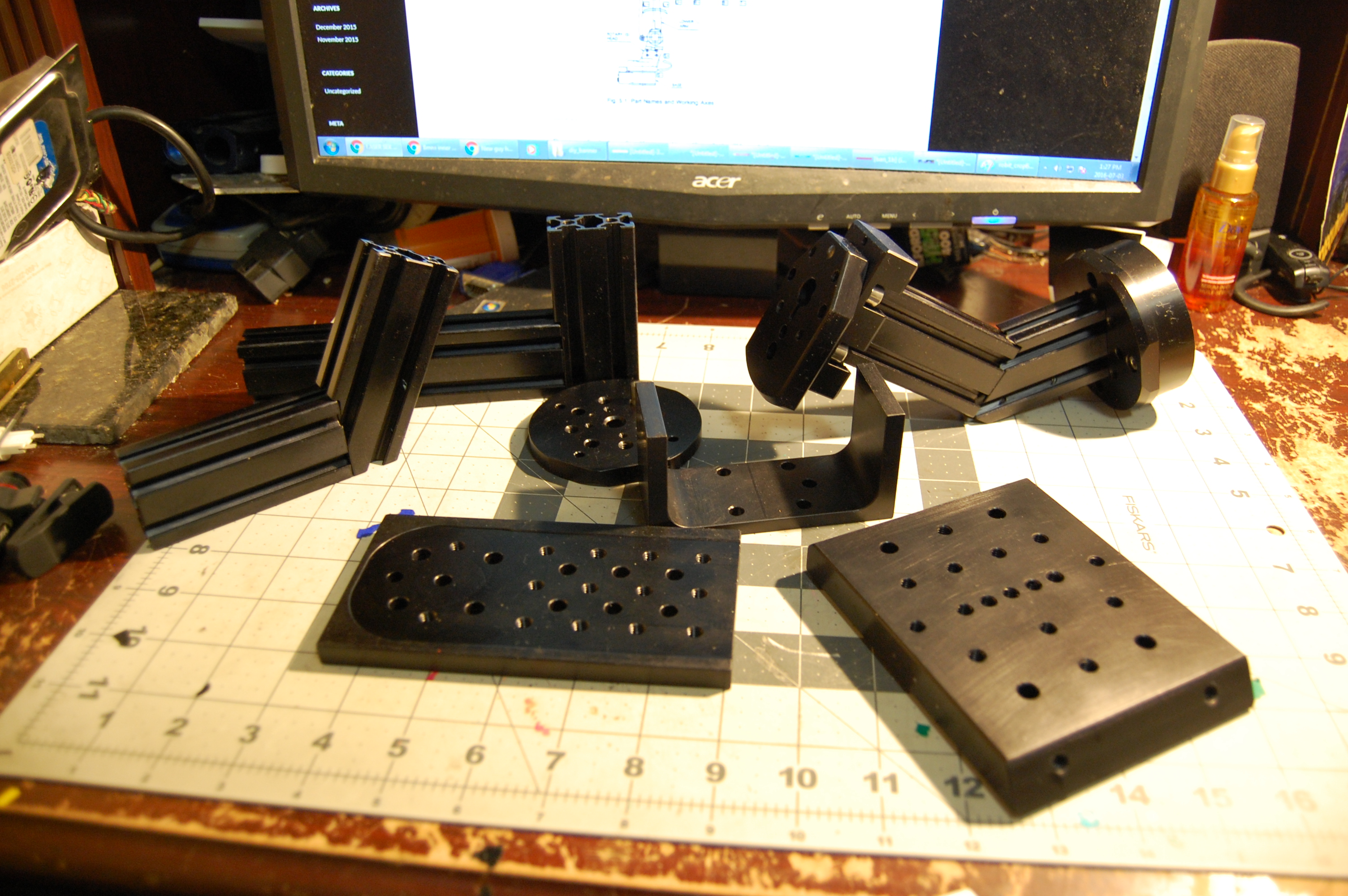
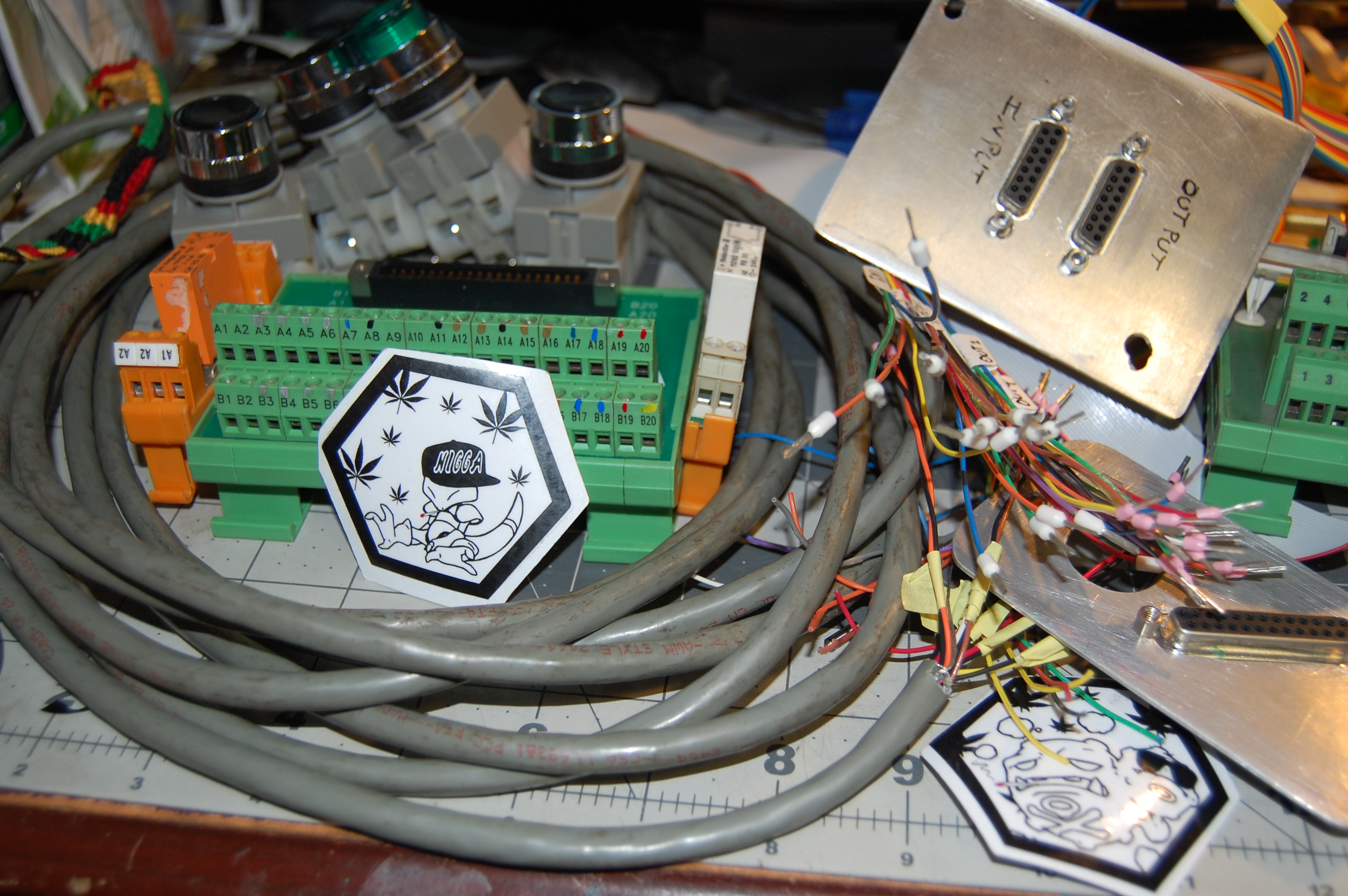
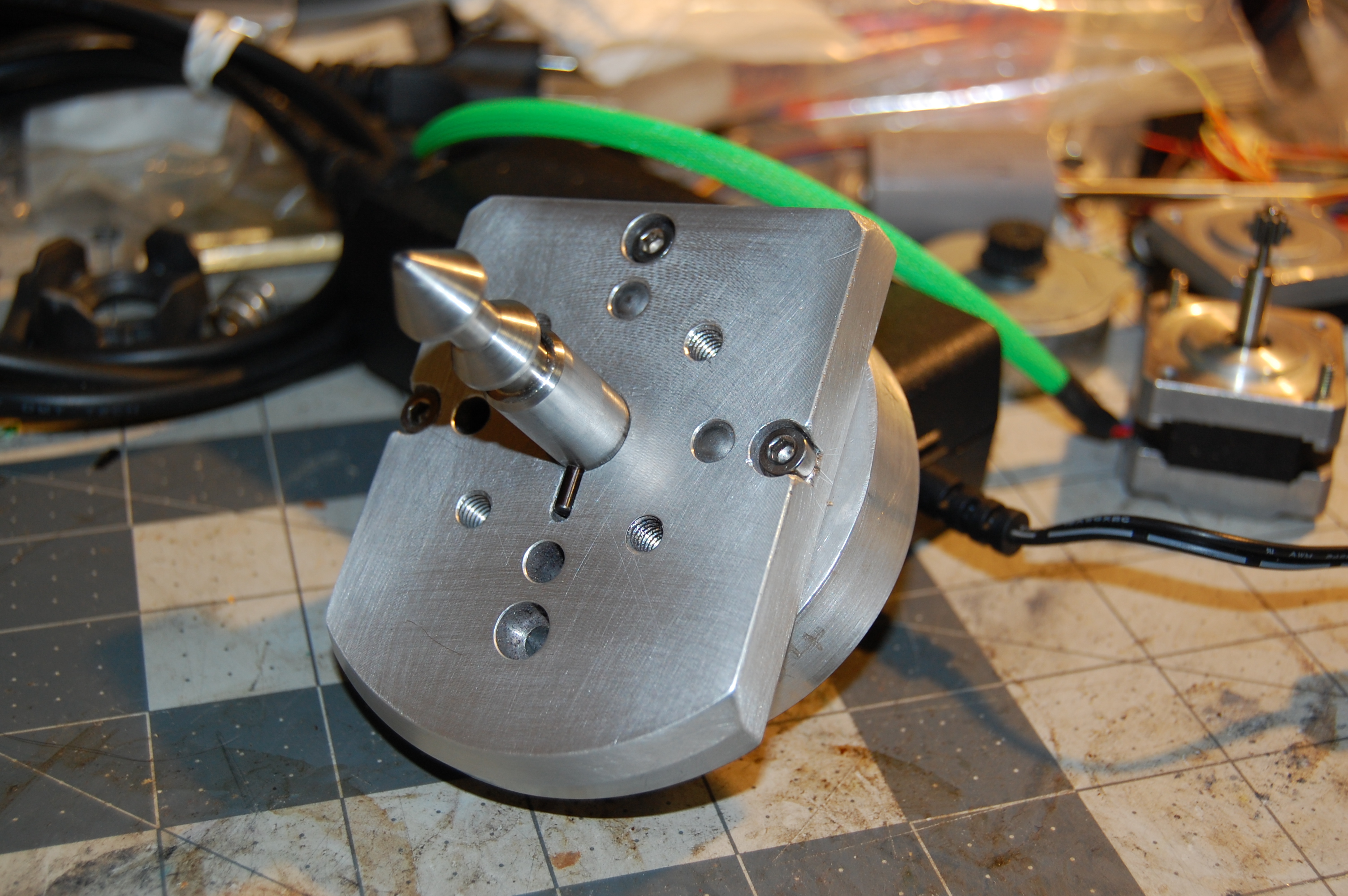
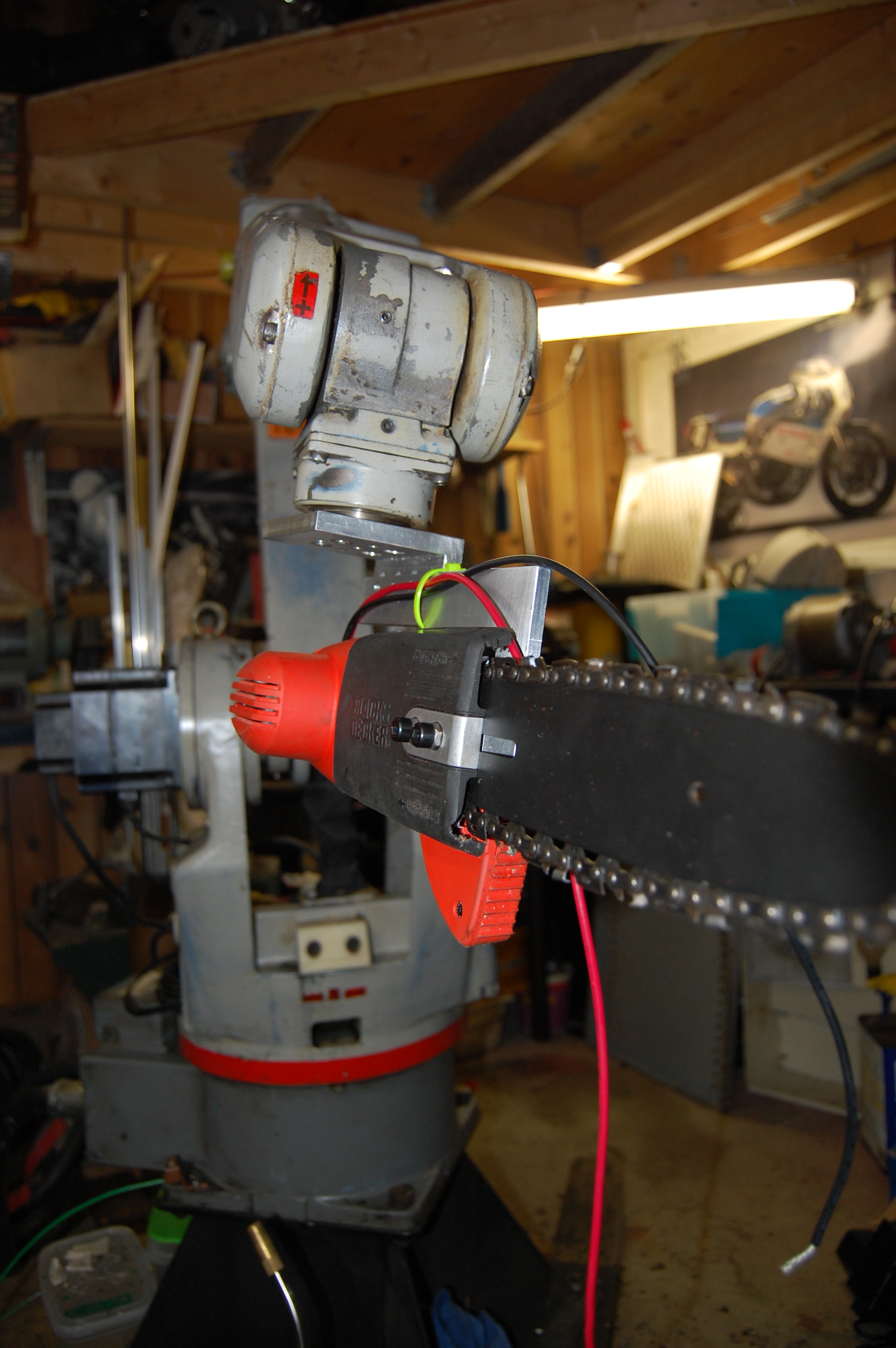
End of arm tool #4 is basically robotics;dildos, but more about the tool
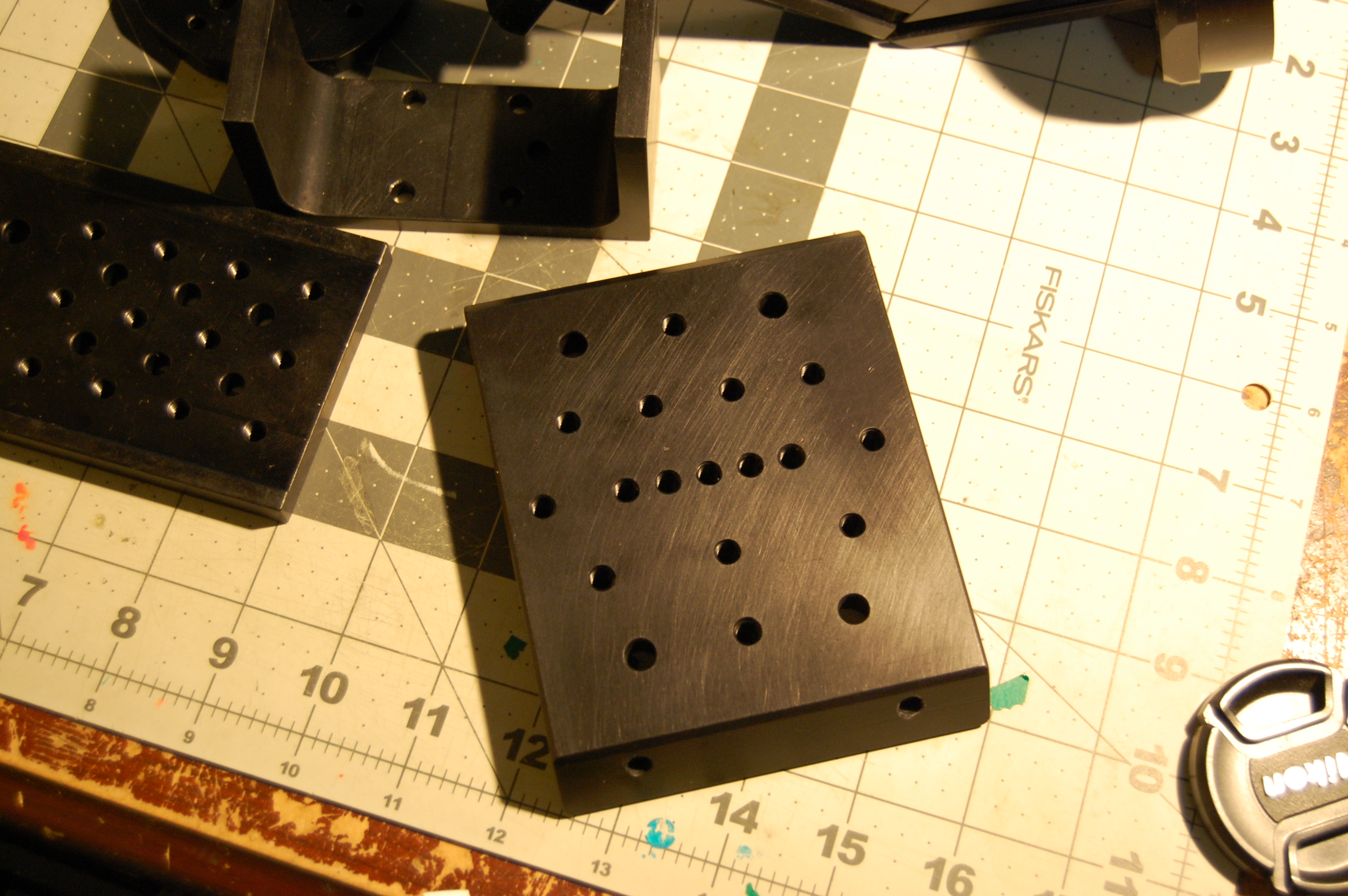
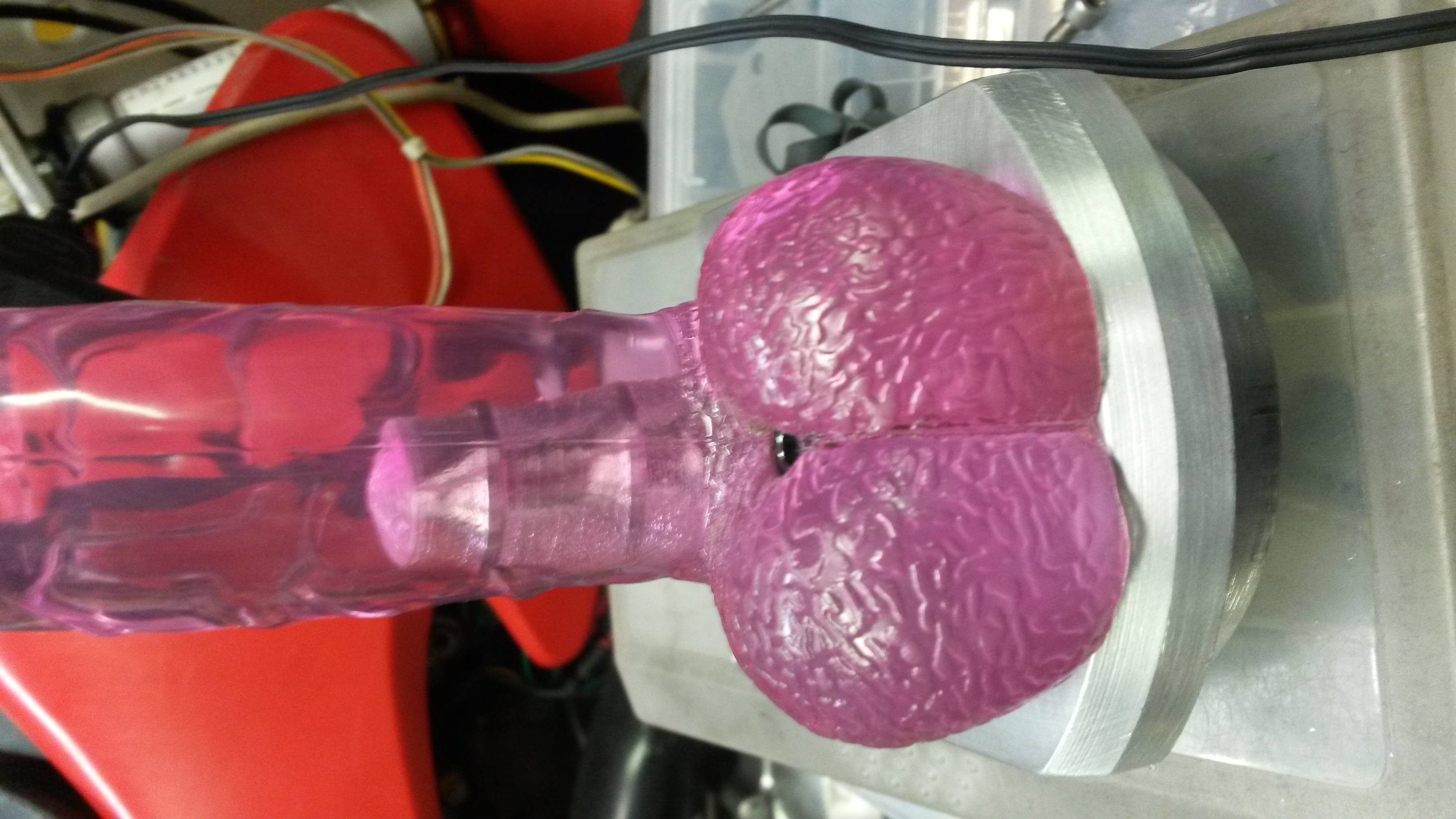
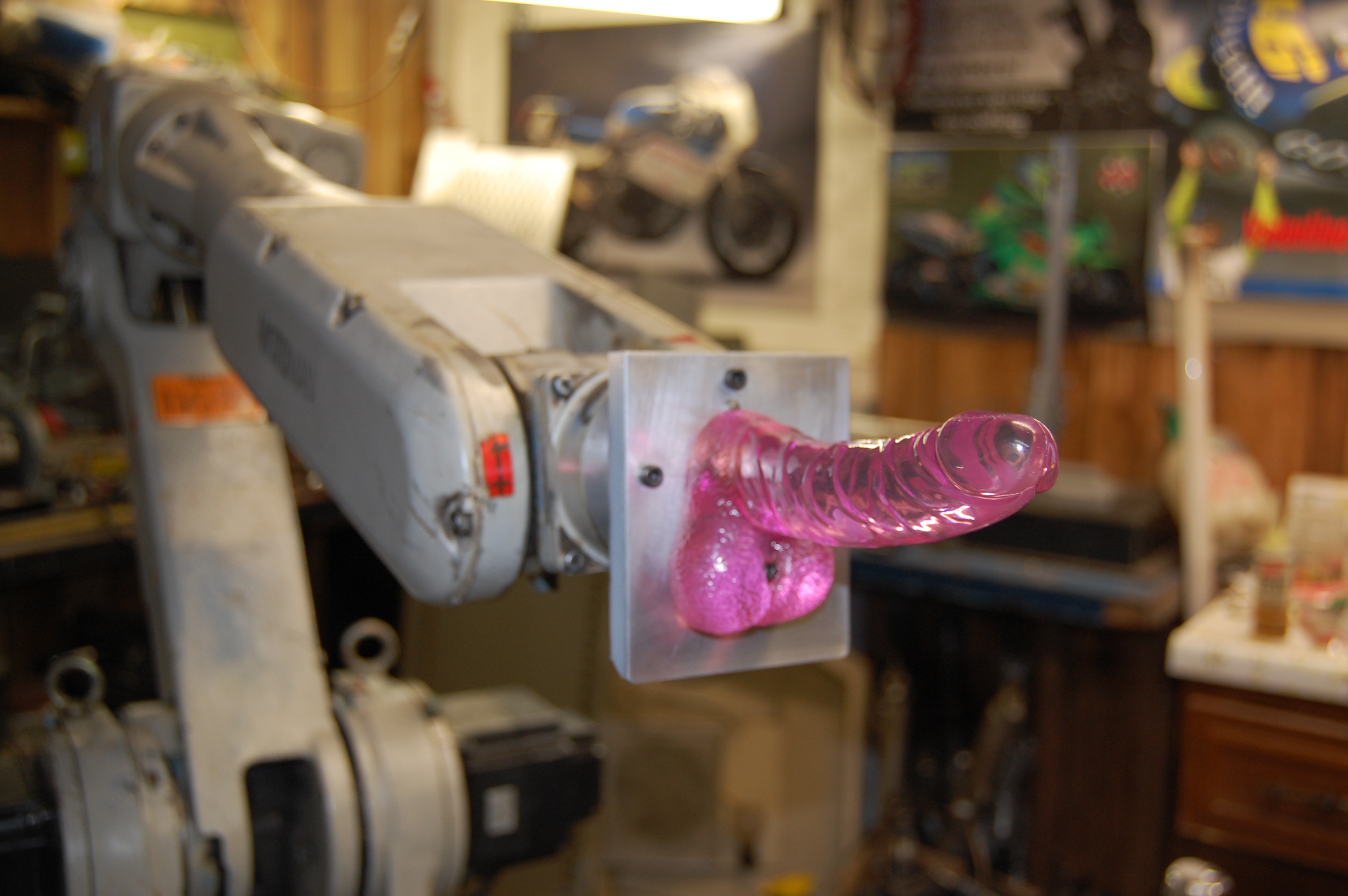
eoat#4 is the base mount i use to mount the dildo. A tapered barb is inserted into the dildo to provide a mounting post and to index the dildo in the proper orientation. The barb is then located into the 12mm adapter plate with a 60mm BCD. That plate is then dowled and mounted on to EOAT4. to give me the most rigid fuck bot around. Eoat4 is the latest tool plate adapter i have made. future revisions will be made out of stainless or some kind of a2 steel maybe.
Barb mounted off center. fuck. now i have to buy more dildos (oh no!)